
技术验证、系统验证、飞行验证……“验证”这个词常常出现在航天语境中。今天,T字成型的中国空间站已迈上应用与发展的新台阶,而它此前的在轨建造同样经历了长时间的验证——核心舱发射入轨后,在两艘载人飞船和两艘货运飞船配合下以一年时间完成“关键技术验证阶段”,之后才进入“建造阶段”。
2022年4月17日,在两个实验舱升空之前,载人航天工程办公室宣布:关键技术验证阶段的任务目标圆满完成,为空间站建造阶段任务实施奠定了坚实基础。这些“关键”技术,可以理解为建造多舱段空间站、并且保证航天员在有限的地面支持下能够长期生活和有效工作所需的基础技术。
这些技术皆非一日之功,而是由中国航天数十年的艰辛探索积累而来,空间站自身研制也历时十余年。那么,既然很多技术在经年的地面研制以及载人飞船和空间实验室实践中已经得到验证,为什么还得用空间站核心舱在飞行中再次验证?包括仿真在内的地面等效试验无法实现“等效”吗?在轨验证是必需的,还是可以跨越的?验证的成败对工程有什么影响?
作为空间站工程师,在轨验证是我们极为关注的环节。行之愈笃,知之愈明;格物致知,跬步千里。
验证是系统工程一个生命周期寻求满意解的“最后一公里”,验证也是获取新知识、开辟又一个生命周期的基础。验证是辩证唯物主义认识论中的实践环节,它承载了系统建构中的科学理性,成就了今天的空间站,正在徐徐展开国家太空实验室的未来画卷。

▲中国空间站天和核心舱(图源:CMSA)
(一)在轨验证不可替代
验证,是通过客观证据证实规定要求已经实现的方法和过程。
地面试验和仿真很难做到百分百的“真”,数字孪生未必能实现1:1的“孪生”。空间站工程即便已经有了丰厚的载人航天器技术积累、充分的地面验证和成熟的系统预测与风险评估模型,以下三类情况仍须进行在轨验证,以确认航天器物理特性、载人环境和载人活动设计的准确性、真实性与有效性,才能提供载人空间站满足人在太空需求的“客观证据”。
1、第一类:难以在地面模拟的物理条件
地面试验最难以实现的物理条件之一为持续的微重力。短暂的微重力条件可以依靠落塔、失重飞机等创造,但这类试验只能获得数秒至数分钟量级的微重力,通常用于原理验证或人员体验。真正具有时间效应的现象是无法模拟的,更难以开展大尺寸设备的验证。
(1)地面无法模拟和复现天上真实的物理效应。
最典型的是与液体物性相关的验证,在再生式环境控制和生命保障系统中普遍存在。以水的管理和利用为例:采用冷凝方式收集空气中的水分是有效控制空气湿度并间接控制温度的手段;电解制氧需要用水作为原料进行传输和处理,以制备氧气;为提高运行效率减少补给,需对冷凝水/尿液进行收集和再生,从而实现循环利用。
地面条件下,液体的成形和流动同时受重力与表面张力影响。由于水的比重较大,重力的影响是非常显著的,在宏观上远大于表面张力;同样由于重力影响,水中的气泡也会自然向上漂浮、聚集。而在空间站上,这两种效应都会发生显著变化。中外航天员都喜欢展示的喝水场景和中国“太空教师”王亚平在“天宫课堂”上演示的若干液体表面张力实验——尤其是水中注入气泡和泡腾实验,充分体现了水气混合体在微重力环境中的形态。
▲天宫课堂中的水球实验(图源:新华社)
微重力环境中,液体流动时失去了重力的“导向”作用。少量液体不会自然流走或汇集,必须靠强制风吹以及在流道结构设计上充分利用表面张力效应等措施起到导流的效果;大量的液体不会形成自然对流,在混有气体时气液两相流体也不再自动分层,气泡会分布在液体的各个部分。因此,电解制氧、冷凝水和尿液的在轨收集与处理过程中必须进行水气分离,即流动的全程需要持续处理气液混合体。天地环境的差异,导致根据微重力条件分析并设计的装置在地面试验中反映不出在轨运行状态,地面表现出的工作性能也不能体现天上的性能。这就要求液体收集管理及水气分离技术和装置必须在天上进行真实工况的验证。
(2)地面可有限模拟,但由于尺度效应已不适应天上情况。
结构或机构动力学相关工况,是这一类情况的代表。在地面试验时,我们通常采用悬吊、气浮平台等方法补偿结构或机构部件的自重。这类方法对于尺寸重量不大或者运动自由度有限的机构是有效的,对小角度动作也可以线性近似,但对于大质量、大尺寸柔性设备或多自由度复杂三维运动机构就难以奏效了。
比如太阳翼。大尺寸柔性翼频率低,其基频是空间站姿态控制系统非常重要的设计条件。核心舱太阳翼单翼十多米长,面积近70平米;实验舱太阳翼单翼近30米长,面积近140平米。限于其结构形式和众多的伸展机构关节,地面难以通过悬挂或气浮方式消除其各部件的重力并排除工装干扰。大幅面太阳翼在地面试验时还会受到空气阻力影响,进一步加大天地差异造成的频率偏差。地面试验可以获得太阳翼的动力学特征和有一定准确度的估值,但无法精确测量在轨力学特性。
再如机械臂。空间站配置大(10米)小(5米)两个七自由度机械臂,并可组合使用。臂的运动在三维空间中规划,大角度运动时呈现显著的几何非线性特征,如果要通过悬吊补偿自重,须有庞大的随动机构承载总重约1吨的臂杆、关节及其上的工装。即便不惜代价以随动机构实现了整臂三维运动,也无法模拟微重力条件下各运动机构的间隙和空程,因而无法获得臂准确的动力学和运动特性。可行的地面试验方法是以气浮平台支持大重量的臂和负载进行二维运动,三维运动情况则需要以数值仿真或半物理仿真进行。机械臂的三维动力学特性需在轨进行真实动作验证。
庞大的多舱段组合体的控制更不可能在地面实测动力学特性,也无法一一呈现空间站建造过程中各舱段及来访飞行器对接的过程及带来的数十种结构构型。同时,在轨运行时,大型柔性太阳翼的低频特性直接影响组合体的姿态控制精度与稳定度;转位过程中,组合体的力学特性随转位机构或机械臂连接而动态变化。控制算法及参数必须与这些情况匹配,才能获得期望的控制效果。因此,组合体控制方案及实现情况需要在轨实测验证。
2、第二类:人机工效相关的设计
载人航天器核心的设计指向,就是要保证人在太空安全地生活和工作。人的工作状态和能力有显著的天地差异:受微重力影响,人无法像在地面一样借助重力固定身体并抵抗操作力,需要设计专门的装置进行肢体限位,航天员使用的工具也要有专门设计;航天员舱外活动期间,除了微重力,笨重的服装也会影响其动作施展;微重力下所有无束缚的物体都会自由漂移,大件物品在人工搬运和操作时会有难以控制、固定的问题,小件物品如螺母、垫片等则会漂走丢失甚至在不该出现的地方形成多余物。苏美空间站还都出现过航天员出舱活动时失手将工具落在太空中的情况。
空间环境因素带来的这些操作问题都难以真实模拟。在地面,人体动作通常以悬吊方法模拟,但无论施力/受力还是人自身体验都与天上不尽相同。出舱活动的验证和训练可以由航天员穿轻质舱外服悬吊开展,更多的则是在中性浮力水槽中穿着配重与浮力平衡的舱外服模拟天上的操作。水池与天上较为明显的差别在于水有阻力,人和物品的运动都因此存在天地差异。结合生活常识看航天员出舱活动的影像,线缆、安全绳的运动远比在水中更“灵活”并因此不好控制。物品漂移问题则要通过专门设计并结合操作规范进行控制,如连接在设备上不会分离的“松不脱”螺钉、工具安全绳及其使用要求等。人机工效相关设计的合理性有效性、着舱外服出舱活动的可行性及效率、在轨操作规范及程序的正确性、航天员的操作能力及体验等等,都需要在轨进行实际验证并积累经验。
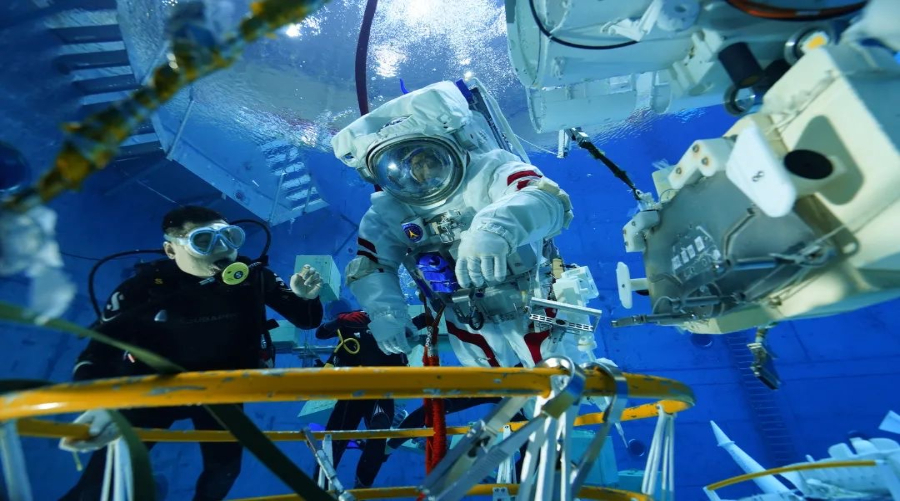
▲中性浮力水槽训练模拟空间操作(图源:我们的太空)
3、第三类:有人存在的物质和生态环境
空间站在密封舱内构建并维持了一个近乎封闭的载人环境,再生式生命保障系统和有限的地面补给共同保障站上人员持续不间断驻留。由于环境的封闭性,其内部的物质循环和生态将会达到动态平衡。(也只有达到物质和生态平衡,封闭的载人环境才能长期维持。)
在这个平衡过程中,人的代谢是重要变量,也是生保系统要随之调节适应并保障的要素之一。人体代谢存在显著的天地差异,微重力空间环境各种工况下的代谢指标本身就是航天医学研究的重点内容之一。这要求生保系统的性能参数与之匹配,并且有足够的调节范围能够适应人体代谢变化。这个封闭环境内的人-机系统既受到在轨环境的影响,又需要经历足够长的时间(一至两个月)才能达到动态平衡并全面覆盖主要工况——比如人的不同运动强度。有人存在的物质和生态环境只能在轨实测并持续足够长时间,才能获得真实有效的数据。
(二)在轨验证推动技术进步
工具、机器、设备等物质要素和知识、经验、技能等智力要素,是推动人类技术进步的主要力量。融合了这两类要素的航天器在轨验证不仅是对系统设计的“盖章”,也将进一步推动科学、技术和工程的前行。
1、国外空间站的进化
上一章所阐述的三类必要验证,在国际同行的太空探索中都有典型案例。
(1)机械臂在发现问题中升级换代。
空间机械臂最具代表性的是加拿大SPAR公司的产品。1981年,六自由度加拿大臂(Shuttle Remote Manipulator,SRMS)首次发射入轨。该臂长15.24米,由3组关节和2节臂杆组成,质量410公斤,随航天飞机多次执行任务,辅助完成过卫星释放和在轨故障卫星的维修及回收。但有文献显示,实际应用中的每个动作结束后,航天飞机上的操作员要等20~40秒等待臂稳定下来,才可以进行下一个动作。由于振动对臂的操作精度和效率产生非常不利的影响,加拿大臂工作时间的三分之一被用于等待振动衰减。考虑到航天飞机平均每分钟高达2万美元的运行费用,振动增加的成本也是极高的。
2002年,具有7个自由度的加拿大II臂(Space Station Remote Manipulator,SSRMS)被安装上国际空间站。该臂长17.6米,包含3组关节和2节臂杆,质量1800公斤,承载116吨,性能较航天飞机上的加拿大臂有了大幅提升。加拿大II臂解决了固定基座运动控制稳定性问题,进一步提升了能力,不仅可以通过两个末端执行器依次抓住安装在空间站上的适配器爬行,还可以抓住移动基座(MBS)、通过移动基座沿空间站桁架导轨移动,扩大了工作范围。但使用者又发现,移动基座沿导轨移动时会激起导轨振动,基座和臂杆间的耦合效应进而导致机械臂末端轨迹发生偏差。NASA和SPAR根据基座表现出的弹性振动特性制定了专门的控制方案,情况得以好转。
经历了两套机械臂在轨飞行后,SPAR公司宣称,现在已经具备只通过仿真而无需复杂物理试验即可完成新机械臂设计的能力。
(2)出舱活动能力在经验与教训中拾级而上。
苏美的首次出舱都遇到了地面未验证和估计到的险情。所有关于1965年3月世界第一次出舱活动的文献都会提到苏联宇航员列昂诺夫(Alexei Leonov)因舱外服膨胀差点无法回到飞船,其实1965年6月的世界第二次(美国第一次)出舱活动也遇到同等危险的情况——宇航员怀特(Edward White)花了5分钟才关上舱门,他的代谢消耗已经超出通风系统的冷却能力,头盔面罩内起雾,汗水流进了眼睛。由于这个意外,任务取消了后续再次打开舱门的计划。
到礼炮号时代,苏联已经积累了近20年的地面训练和出舱活动实践经验,开始进行较为复杂的舱外操作,但充分的地面试验和准备仍替代不了天上的实际经验。1983年11月,礼炮7号宇航员利亚霍夫(Vladimir Lyakhov)和亚历山德罗夫(Alexander Alexandrov) 在3天内进行了两次时长分别为2小时50分钟和2小时55分钟的出舱,完成了一套太阳电池阵列的扩展升级。下一组宇航员汲取他们在轨操作的经验教训,在地面的中性浮力水槽开展训练。1984年5月,奇兹米(Leonid Kizim)和索洛维耶夫(Vladimir Soloviyov)仅以一次3小时零3分钟的出舱活动,即完成了操作内容相似的第二套太阳电池阵列升级工作,效率提高近一倍。
美国的出舱活动也是不断完善的过程。双子座飞船时代,出舱的目的和内容从验证出舱活动可行性逐步发展到试验舱外机动装置、舱外拍摄、两航天器之间爬行、取回舱外设备等简单操作。直到1966年9月,美国的第5次出舱才开展了系绳辅助的人造重力试验、脚限位器试验和电动工具使用等“复杂”活动。这次任务之后,宇航员戈登(Richard Gordon)说:“我在地面训练中做过多次、最多用30秒钟完成的一个很小且非常简单的作业,在太空中竟然花了大约30分钟……我也知道在太空中作业比地面更难,但在此以前我并不知道难到什么程度。”也是从这个时期开始,天上返回的宇航员开始在水槽中对实际活动进行模拟并不断完善模拟方法,最终使中性浮力水槽成为地面训练最重要的设施之一。
到了国际空间站时期,特别是有了机械臂的协助,美俄的舱外作业能力已经运用自如。美国已经可以对未作专门维修性设计的阿尔法磁谱仪(Alpha Magnetic Spectrometer,AMS)流体回路热控系统的管路设备进行排故和修复,俄罗斯则在联盟飞船出现泄漏孔洞后马上组织出舱查看和拍摄。这些进步都是天上实践经验的积累推动天地设施、地面验证和训练方法同步完善的结果。
(3)再生生保技术在系统迭代中成熟完善。
苏联/俄罗斯的近地载人技术发展保持了连续性。空间站经历了“单舱单对接口”(礼炮1~5号)到“单舱双对接口”(礼炮6~7号)直至“多舱积木式组合”(和平号)的演进。在这个过程中,生命保障系统由礼炮系列的非再生式发展到和平号使用的再生式,而再生生保各模块的逐步成熟也是随着和平号的舱段分阶段上天实现的。在和平号运行前期,不完整的再生式生保系统还需要非再生设备作为补充。和平号的成功技术成为后来国际空间站生保系统的重要基础。
2002年,国际空间站俄罗斯舱电解制氧发生器出现故障,据公开报道是由于气泡阻断了输送过程。这很有可能就是在水气分离环节出现的问题。2010年,美国舱的水循环系统发生堵塞,分析认为是航天员尿液中高浓度的钙导致,而尿液含钙高又是因为太空微重力环境下航天员骨骼中的钙流失超出了预期。
由此可见,即使到了国际空间站持续载人飞行的二十一世纪,水气分离技术和装置以及人体代谢相关的工程设计仍需要在真实环境中进一步检验和探索。
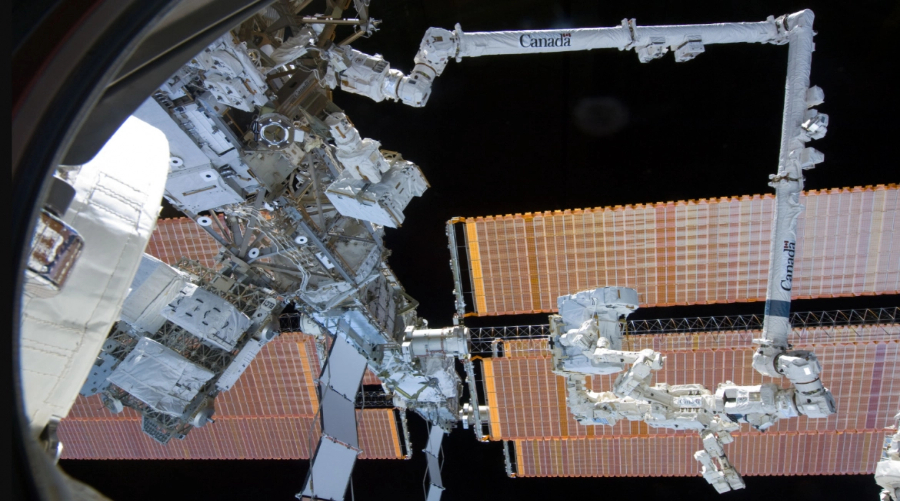
▲性能比第一代大幅提升的国际空间站二代加拿大臂(图源:NASA)
2、中国空间站的进阶
中国空间站利用天和核心舱单舱飞行进行关键技术验证。根据公开报道,各关键技术的验证情况如下——
航天员长期在轨驻留生活和工作保障:天和核心舱相当于一个单舱空间站,其功能和生活、工作设施已经具备长期载人的保障能力。两个神舟乘组先三个月、再六个月分步验证了半年轮换周期的驻留情况。考虑到航天器初始状态设置工作量大等因素,首个乘组驻留时间稍短。
再生式环境控制和生命保障:天和舱配置了一整套再生生保系统,结合航天员的驻留对水、气资源的再生处理、载人环境控制与调节、生保设备维护、物化反应耗材更换等进行了验证,覆盖了长期飞行的工作情况,并对乘组各种工作与生活状态下的代谢情况及载人环境物质平衡进行了实际测试。
大型柔性太阳电池翼和驱动机构:核心舱太阳翼完成了在轨展开、太阳跟踪和动力学特性辨识。实验舱太阳翼与之采用同类机构,可以借鉴验证数据。
机械臂辅助舱段转位:大机械臂结合空载运行进行了动力学特性辨识,结合出舱活动辅助航天员运动进行了小载荷运动性能测试,结合天舟二号货运飞船进行了转位动作的在轨试验,验证了臂的重载运行及组合体转位的动力学过程。
航天员遥操作交会对接:天舟二号货运飞船撤离前,神舟十三号乘组在空间站上对其进行了遥操作交会试验。
出舱活动:神舟十二、十三两个乘组各进行了两次出舱活动,工作项目由简到繁,对舱外爬行、舱外工具使用及设备安装、机械臂辅助运动、舱内外协同操作、天地协同程序等均进行了验证。人与气闸舱配合也完成了出舱/回舱全流程验证,考核了大气成分控制及舱外服的功能性能及人-服装-舱接口。
大型组合体控制:通过神舟飞船与天舟飞船的来访与分离,对变构型组合体的控制方案、控制参数选择、控制模式切换等均进行了验证,也验证了机械臂、太阳翼与舱体控制间的相互影响。
通过核心舱近一年的飞行验证,空间站建造和稳定运行的关键技术已经确认掌握,空间站的系统方案和包括两实验舱在内的设计状态可以保证航天员在轨长期安全、健康生活,有效开展舱内外工作;载人环境的控制及物资补给符合预期,可以长期稳定运行;大型柔性太阳翼的可靠性及性能得到验证;机械臂可以投入辅助出舱、舱段转位等任务执行;组合体各构型及转位过程均可稳定控制;建造过程中若出现实验舱交会对接和转位故障,工程具备一定的应对能力(如手控遥操作交会和航天员出舱排故等手段)。在关键技术全面有效验证的基础上,空间站开始建造是稳妥可行的,工程据此转入建造阶段。
值得一提的是,所有的在轨验证完成后,工程师们都根据天上的情况修正了地面研制相关的模型。特别是针对微重力环境下的大型机构动力学特性,核心舱专门配置了测量和辨识系统,并设计了太阳翼和机械臂的特定动作,对它们的动力学特性进行了辨识,结合机械臂转位货运飞船的试验对组合体动力学特性做了辨识。
这是反问题求解的典型应用。通常的正向设计是已知结构的力学特性求导其响应,并据此设计其功能性能。这里则用了反演思路,将地面无法测准的响应状态在天上真实环境和真实工作条件下进行测量,反解其频率、模态、阻尼等动力学参数,再根据辨识获得的参数对控制算法及参数进行评估,视情修改。实践表明这一验证方法是成功的,不仅修正完善了空间站自身的控制参数,而且对机械臂、太阳翼及舱段组合体的仿真模型也进行了修正。通过特性辨识和参数修正,后续两个实验舱进行转位时,动力学仿真预测与实际在轨动作的偏差已经小于3%。
中国空间站是具备扩展性的。基于在轨辨识获得的高价值参考数据,未来新的舱段、新的产品可以使用更加准确的模型去模拟天上的工作情况。这是在轨验证对提高地面研制能力的贡献,是设计与验证构成的良性循环,其本质则是通过在轨飞行让我们对天地差异有了量化的、更准确的认知。
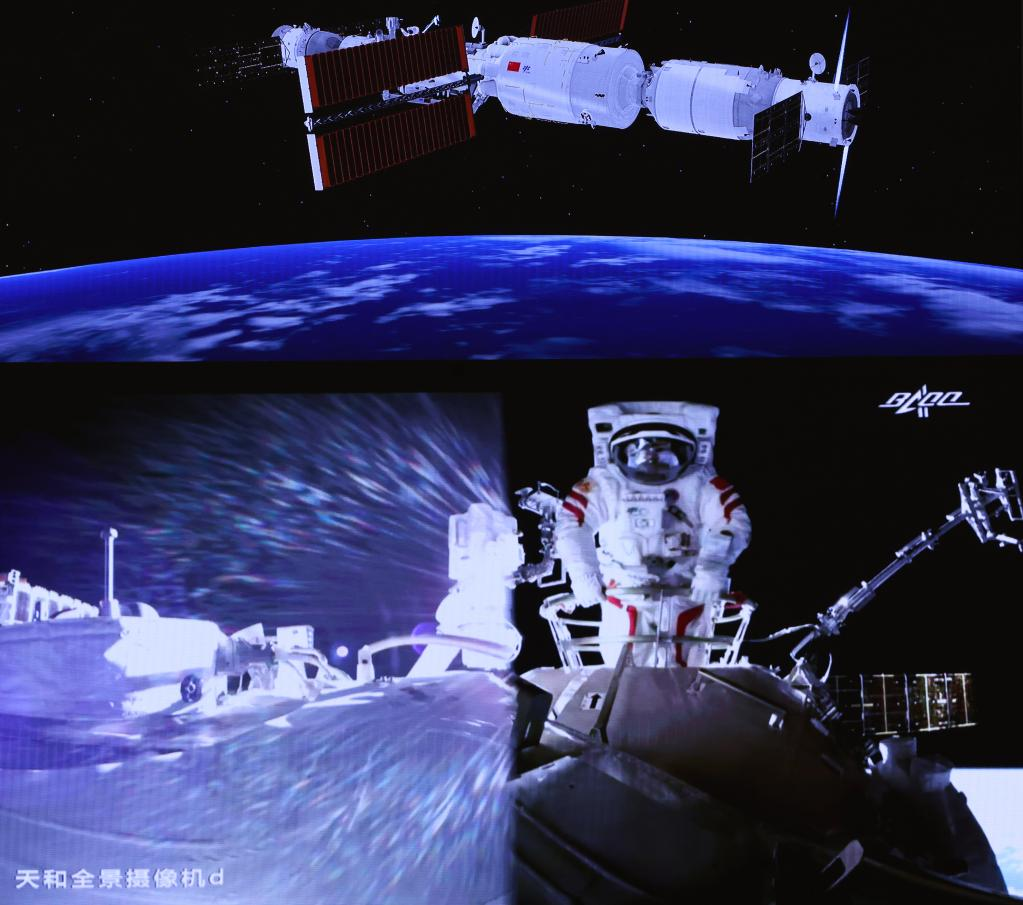
▲神舟十二号航天员开展中国空间站首次出舱活动(图源:新华网)
(三)在轨验证铺就工程阶梯
载人航天这样技术难度大、技术跨越大且持续数十年的航天工程中,相关的技术和产品验证本身就是工程规划的一部分。各项技术目标被分解并逐步实现,这既是规划的结果,也是工程能够分阶段实施的必要条件。其中,在轨验证为不可或缺的环节。
苏联的空间站经历了从单舱到多舱、从单对接口到多对接口的发展历程,推进剂补给、再生生保等功能都是在历代空间站上逐步增加、或是在和平号上分舱段上天逐步实现的。美国在其单舱空间站天空实验室之后转向航天飞机,近地空间站技术中断了。国际空间站选择与俄罗斯合作,以俄罗斯核心舱作为整个空间站的核心舱实现了后续建造任务。应该说,假以时日,美国是有能力建设核心舱并直接突破长期载人技术的,但通过合作方式更快地建成了空间站,之后又在空间站上开展了长期载人等技术验证。
各国空间站技术皆循序渐进,我国也不例外。
1、“三步走”逐步验证关键技术
以大的视野看,中国载人航天“三步走”就是核心关键技术逐一验证并逐步递进的过程:
首先,以载人飞船任务突破天地往返技术,保证人可以安全地被送入轨道、在轨生存工作并返回地面。这是载人航天的安全保证和基础技术。
第二步,先开展出舱活动,保证人能够在舱外工作;再经空间实验室任务掌握交会对接技术,使舱段组装、人员轮换、物资补给等具备了可行性。这是建造和运行空间站的必要条件。
最终,建造多舱段空间站并持续运行。
可以说,每一步任务所需的关键技术都在前一阶段通过实际飞行完成了验证,并对掌握情况进行了确认。
2、“三步走”逐步验证任务方案
每一步的技术验证目标,需要恰当的实施方案与之匹配。验证目标直接影响验证方案,最终与工程成本、时间等约束条件一起决定工程任务方案的制定。
以突破并掌握交会对接技术的“第二步”为例。交会对接技术应如何验证?采用何种方案?各国交会对接的验证方案不尽相同:美国以双子座飞船与运载火箭改造而来的“阿金纳”目标飞行器进行交会对接;苏联两艘飞船分别充当追踪和目标飞行器;日本则用ETS-VII卫星释放一个小目标飞行器之后再去追踪和对接。
在神舟飞船成功飞行的基础上,我国曾提出两种验证途径:一是基于成功应用的飞船留轨舱技术,研制长寿命的2吨级目标飞行器;二是新研8吨级目标飞行器。从验证交会飞行和对接这两项技术的目标来看,两种方案初看都是可行的,也都具备工程研制能力。在方案论证期间,我们的航天前辈、两弹一星元勋之一的王希季先生提出了问题——“突破交会对接技术”的标志是什么?
王希季先生的观点是,突破的标志取决于验证目标:载人航天所需要突破的交会对接技术是为后续建造和运行载人空间站服务的,那么交会对接的验证目标就必须包含以下四个方面技术的验证和掌握:
(1)交会:空间站舱段和飞船能先后发射并在太空中会合;
(2)对接:舱段之间、空间站与来访飞行器之间要能够实现刚性连接和任务后的分离;
(3)组合体控制权交接:空间站各个舱段独立发射,在对接后要形成统一控制的多舱段组合体,各来访飞行器要融入该组合体接受统一管理,并在任务结束后分离,恢复独立飞行器状态。组合体是动态变化的,空间站和各飞行器间在运动控制、信息管理、供电及载人环境等方面都要在对接后实现1+1=1,分离时做到1-1=1;
(4)人员和物品转移:空间站与飞船之间必须进行人员和物品转移。这一要求看似理所当然,实际上直接决定了对接机构的方案必须满足对接后形成载人通道的要求,显然日本ETS-VII卫星的对接机构是无法胜任载人任务的。
以上述四个方面作为验证标准,美、苏、日的首次交会对接飞行都没有完全验证载人任务所需技术。美苏通过后续多次飞行递进式完成了全部功能的验证,日本直到HTV货运飞船与国际空间站对接才部分掌握了载人交会对接技术——其组合体控制能力完全掌握在空间站一端,对接机构也配置的是美国舱段的通用端口CBM。
同样,以这些标准来审视我们的交会对接验证方案,显然只有8吨级目标飞行器具备同时满足四项验证目标的能力。这就是天宫一号的由来,空间实验室任务阶段的工程方案也据此形成。
回到空间站。关键技术识别完成后,选取何种验证方案?作为突破与掌握技术的标志,我们不仅要完成原理性验证,还要有工程产品实现能力的验证。比如,必须有空间站核心舱的体量,才可能对大型柔性太阳帆板、整套再生生保系统、大型机械臂以及人员长期驻留进行1:1考核,达到验证目的。因此,在综合考虑了地面验证基础并统筹飞行任务规划之后,整个空间站建造任务被分为关键技术验证与建造两个阶段,以核心舱本身作为试验载体,在其单舱飞行期间进行关键技术验证。这一方案还同时兼顾了对核心舱自身性能及健康状态的考核与评估,通过考核确认可以在其基础上对接后续舱段、建造空间站并开始10年以上的运行。
从航天器功能上看,核心舱是中国空间站的大脑与母港。从工程过程来看,核心舱是空间站技术验证的前锋、建造组装的基石。以天和探索“天时地利人和”,核心舱不负使命。
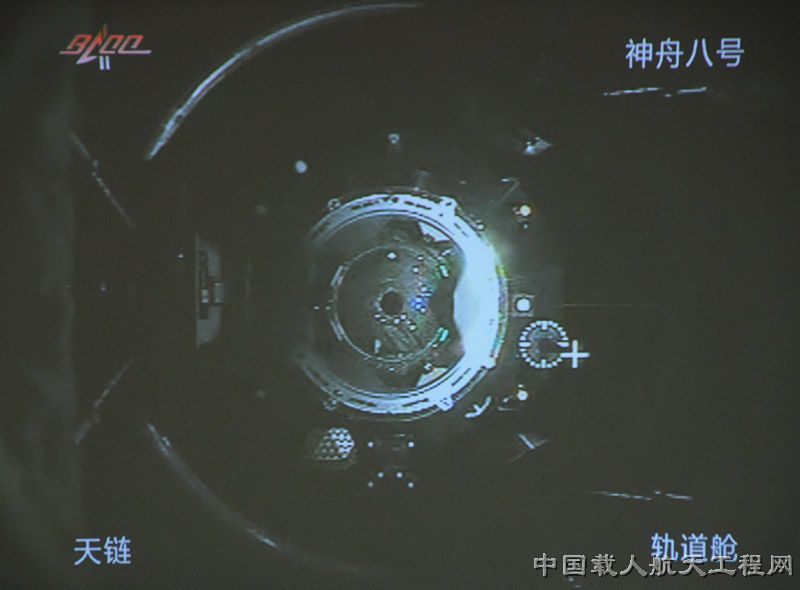
▲天宫一号/神舟八号验证交会对接(图源:CMSA)
(四)在轨验证的更多思考
航天器飞行之前有严格的试验验证要求和规范。包括单机、子系统和飞行器整体在内的新研产品需要进行鉴定性试验,以验证其设计、制造的正确性及在预期工作环境下的功能性能是否达标并有预期裕度。对于上天产品,还要进行检验性试验和验收测试,才能确保该产品是合格的,能够经历火箭发射的考验并能在轨道环境中正常工作。
即便如此,必要的在轨验证仍然至关重要。在航天发展早期阶段,由于研制者对火箭飞行和太空运行的各种条件了解有限,这类试验性的飞行非常普遍,即以真实环境下的实际飞行本身作为试验方法,对新设计的飞行器或其中若干技术进行验证。随着人们对太空和航天器的了解越来越多、越来越深入,更多试验项目可以通过地面物理模拟或数值仿真获得有效验证,在轨实飞验证的需求相对已经减少了很多,地面试验/仿真设施与方法则大幅进步和完善。
在这样的背景下,几个问题值得探讨。
1、航天任务是否允许尝试和失败?
回答是肯定的。如上所述,飞行本身就是有效和必要的验证手段,有的飞行任务完全以验证为目的,比如神舟飞船的几次无人试验飞行和SpaceX的星舰飞船原型机试飞。
但是,这个“允许”是有条件和前提的:
(1)充分有效的地面验证,是飞行试验的前提和基础。
我们非常强调地面试验,允许甚至鼓励通过尝试、试验去暴露问题、发现问题,必要时甚至会专门安排试验复现问题以求吃透本质。我们不提倡的是:试验设计和实施不到位,未能全面和有效验证;发现了问题,但因未吃透机理而解决不彻底,或者因其他各种原因不彻底解决;因为有了尝试的机会就什么都靠试,实际是由于不明就里而让任务变成了盲目试验。这些做法都会把本该地面解决的问题带到天上,徒增风险与成本。无论地面和天上,试验必须要有明确目的、针对性,要有验证有效的判据与明确结论,发现的问题要闭环。
早在1960年代,航天前辈们就对型号研制的复杂性综合性和总体设计的重要性有了深刻认识,钱学森先生总结提出了“一切通过总体、一切通过地面试验”的航天可靠性理念。这里的“总体”,是指以组织而不是个人来保证工程研制的全面性、有效性和系统协调性;“地面试验”,意味着凡是能经地面试验或模拟试验证实的,就不要带到飞行试验中去考验。换句话说,不允许问题出在天上。
关于是否允许尝试和失败,“两个一切”是最好的回答。
我曾经在介绍地面试验情况时被问到“试验出现问题是什么心情”。我当时回答:我们不希望出现问题,但问题一旦发生了,我们又觉得是好事,因为毕竟它出在地上而不是天上。我相信这是航天器研制者们普遍的真实想法。
(2)有效数据的获取,是判定飞行试验成败的重要标准。
飞行试验的成功与否,取决于此次飞行的验证目的是否达到。如果有效数据全部拿到、实现验证目标,那么这次飞行就是成功的,即使出现损失也是值得的;否则,“成功”就要打折扣。
在实际飞行试验中,遥测几乎是拿到相关数据的唯一手段,而遥测只能通过传感器、视频等获取有限信息。而当飞行试验发生大的故障或损失,即便是遥测数据也很难完整有效地获取。这一点与地面试验完全不同。地面不仅可以设置比飞行遥测多得多的观察测量手段,还可以通过产品拆解检查等直观方法拿到遥测无法反映的、全面得多的状态信息,出问题的产品同样能获得有价值的信息。从这个角度看,以飞行作为验证手段的难度和风险大于地面,不到不得已并非应优先选择的方案。
同样从技术验证出发,飞行产品的回收和重复使用除了经济上的意义,对于获取验证结果来说具有极大优势。通过回收,到手的不仅是完整数据,还有产品本身。比如神舟飞船的返回舱,可以得到各个部位防热材料的实际烧蚀形貌、工作后的发动机状态等等,远远超越遥测所能获取的信息。在某种程度上,重复使用为SpaceX航天器的快速迭代提供了非常有价值的基础数据,推动其发展进入良性循环。
2、在轨试验终究会被替代吗?
回答是否定的。在充分地面验证的基础上,必要的在轨试验一定要有,试验性的航天器以及航天工程步步推进的验证任务也会一直存在。
一方面,在轨试验越来越多地起到在真实环境下辨识和修正仿真模型的作用。前面提到的机械臂案例,对认识空间环境及影响和提升地面设计、仿真及验证能力起到了很大作用。
另一方面,随着任务要求和难度的提高,在轨试验的新需求会不断涌现。究其根本,仿真建立在足够的“已知”基础上,通过物理试验的积累掌握了足够准确的模型,就可以用仿真模拟我们已知的领域,该领域内各种不同工况可以不再重复物理试验。然而,随着已知的增加和仿真能力的提高,我们总是会期望探索其他的“未知”新世界,比如从近地轨道走向月球、火星。航天飞行中更多的未知,需要以实际体验和物理知识结合,才能真正懂得。
科幻作家刘慈欣曾表达过一个观点:元宇宙不能替代星际航行。这句话折射的不仅是情怀,更是人类认识与改造客观世界的客观规律。
3、空间站的在轨验证结束了吗?
答案仍然是否定的。空间站进入建造阶段之前,核心舱完美履行了关键技术验证的职责;空间站完成在轨建造的今天,更多验证仍在继续。拥有长期近地轨道和微重力环境的空间站能够提供天文、物理、材料等空间科学研究,也是航天新技术在轨验证的理想场所。
与无人的试验卫星相比,载人空间站优势突出:专业人员可以在太空现场开展试验,直接、实时、全面了解试验情况并进行现场调整,试验全程可控,出现问题可处置,更换试验样品和切换工况更是不在话下;航天员可以现场搭建试验设施——例如辅助大型机构展开,极大地提高设备工作的可靠性,还可以设置并充分利用各种测量设备获取数据;利用天地通信手段,天上的数据、图像可以传到地面,试验现场的航天员可以与地面专家团队交流;航天员可以现场选取、包装试验样品,送样品随飞船返回地面供详细分析。
人的参与提升了空间站作为技术验证平台的能力,而“人”相关的技术也是空间站验证工作的重要内容:开展人体医学研究;进行新一代生保系统的研究,特别是可利用扩展舱段进行受控生态技术的验证;以充气式密封舱为基础,开展空间环境对生物影响及防护措施的验证;结合舱内外活动,开展微重力环境下的应用工具验证及效果评价;研制智能机器人,辅助航天员开展舱内外工作,研究人工智能作为航天员伙伴在轨长期飞行的生活和工作模式……
苍穹之上的T字是中国空间站基本构型在轨建设的结果,也是未来延展的起点;是中国载人航天工程完成“三步走”的成就,也是国家太空实验室开发利用空间资源的新篇。以飞行验证观察载人航天工程,闪烁于时空之间的是人类在实践中追求和发展真理的文明之光,它让我们勇敢而坚韧,睿智而理性。
▲T字构型的中国空间站(图源:CMSA)
监制:唐心怡
编辑:杨柳、张琦
校对:崔祎璁


